
Introduction
This tutorial shows how to use two powerful features of OpenCL™ 2.0: enqueue_kernel functions that allow you to enqueue kernels from the device and work_group_scan_exclusive_add andwork_group_scan_inclusive_add, two of a new set of work-group functions that were added to OpenCL 2.0 to facilitate scan and reduce operations across work-items of a work-group. This tutorial demonstrates these features on our very own GPU-Quicksort implementation in OpenCL, which, as far as we know, is the first known implementation of that algorithm in OpenCL. The tutorial shows an important design pattern of enqueueing kernels of NDRange of size 1 to perform housekeeping and scheduling operations previously reserved for the CPU.
In this tutorial you’ll see how to use Intel® tools for OpenCL. The Intel® SDK for OpenCL™ Applications is the development platform for OpenCL applications on Intel® Architecture. In addition to the SDK, the Intel® VTune™ Amplifier XE is the tool to analyze and optimize applications on Intel platforms on both CPU and GPU, and it includes support for OpenCL. Learn more about Intel tools for OpenCL athttp://intel.com/software/opencl.
I want to thank Deepti Joshi, Allen Hux, Aaron Kunze, Dillon Sharlet, Adam Lake, Michal Mrozek, Ben Ashbaugh, Ayal Zaks, Yuri Kulakov, Joseph Wells, Lynn Putnam, Jerry Baugh, Jerry Makare, and Chris Davis for their help in developing, reviewing and publishing this article, accompanying code and editing the video. I also want to thank my wife Ellen and my kids Michael and Celine for their unwavering support and understanding.
A Brief History of Quicksort
Quicksort is an algorithm invented by C.A.R. (“Tony”) Hoare in 1960 while at Moscow State University. Tony Hoare was a graduate student studying Probability Theory under Professor A.N. Kolmogorov. Hoare learned Russian while in the Royal Navy where his uncle was a captain. Hoare was trying to sort words of each incoming Russian sentence into ascending order while working on problems of machine translation of languages. The basic idea of the Quicksort algorithm is to partition the sequence to be sorted around the pivot element, which could be selected from the sequence in a number of different ways, where all the elements less than the pivot are placed on the left hand side of the array, all the elements greater than the pivot are placed on the right hand side of the array, and all the elements that are equal to the pivot are placed in the middle of the array. After the array has been partitioned, the quicksort algorithm is reapplied to both the left hand side and the right hand side of the sequence.

A Brief History of Quicksort
Quicksort is an algorithm invented by C.A.R. (“Tony”) Hoare in 1960 while at Moscow State University. Tony Hoare was a graduate student studying Probability Theory under Professor A.N. Kolmogorov. Hoare learned Russian while in the Royal Navy where his uncle was a captain. Hoare was trying to sort words of each incoming Russian sentence into ascending order while working on problems of machine translation of languages. The basic idea of the Quicksort algorithm is to partition the sequence to be sorted around the pivot element, which could be selected from the sequence in a number of different ways, where all the elements less than the pivot are placed on the left hand side of the array, all the elements greater than the pivot are placed on the right hand side of the array, and all the elements that are equal to the pivot are placed in the middle of the array. After the array has been partitioned, the quicksort algorithm is reapplied to both the left hand side and the right hand side of the sequence.
A Brief Introduction to GPU-Quicksort
The first known quicksort algorithm for the GPUs was developed and described by Shubhabrata Sengupta, Mark Harris, Yao Zhang, and John D. Owens in their paper "Scan Primitives for GPU Computing". The algorithm that we are presenting here, GPU-Quicksort, was first described by Daniel Cederman and Philippas Tsigas in their paper “GPU-Quicksort: A practical Quicksort algorithm for graphics processors” and was an improvement on the first quicksort on the GPU. While originally written in CUDA* to run on Nvidia* discrete graphics cards, the algorithm is easily implementable in OpenCL to run on any hardware that supports the OpenCL API. The algorithm was specifically designed to take advantage of the high GPU bandwidth and runs well on both OpenCL 1.2 (Intel® HD Graphics 4600) and OpenCL 2.0 drivers (Intel® HD Graphics 4600 and Intel® HD Graphics 5300 or above). For an excellent overview of the GPU-Quicksort, see Section 3.1 of the Cederman and Tsigas paper.
As the original Quicksort, GPU-Quicksort recursively partitions the sequence of elements around the pivot until the entire sequence is sorted. Since the algorithm is written for the GPU, it consists of two phases, where in the first phase several work-groups work on different parts of the same sequence until subsequences are small enough to be fully sorted by each work-group in the second phase.
The main idea of GPU-Quicksort is to divide the input sequence into blocks and assign them to different work-groups, where each work-group participates in partitioning the input sequence around the pivot in a two-pass process: first each work-item of a work-group calculates the number of elements less than and greater than the pivot that it sees in the block. The work-group scan add built-ins are used to find the cumulative totals of elements less than and greater than the pivot. An auxiliary array is used to allocate space for each work-group. The second pass thru the data writes the elements less than and greater than the pivot into the allocated space. Finally, the last work-group fills the gap with the pivot value.

GPU-Quicksort in OpenCL 1.2
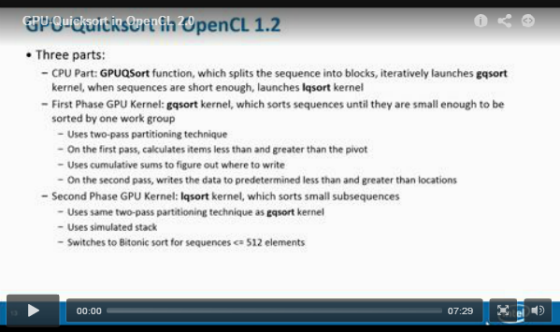
The GPU-Quicksort in OpenCL 1.2 is a straightforward implementation following the algorithms described in the Cederman/Tsigas paper. The three parts are the CPU portion implemented by the GPUQSort function, the GPU First Phase Kernel implemented by the gqsort_kernel OpenCL kernel function, and the GPU Second Phase Kernel implemented by the lqsort_kernel OpenCL kernel function. The GPUQSort function iteratively launches gqsort_kernel until the initial sequence is partitioned into small enough chunks such that each chunk can be sorted by one work-group. At this point GPUQSort launches lqsort_kernel to complete the sorting job.
The GPU-Quicksort implementation requires barriers and atomic functions that are available in OpenCL 1.2 and are supported by practically all modern hardware capable of running OpenCL 1.2. Specifically, atomic_add, atomic_sub, and atomic_dec are used in implementing gqsort_kernel. Barriers are used extensively in both gqsort_kernel and lqsort_kernel.
The disadvantages of using OpenCL 1.2 are:
lack of work-group scan primitives, which required using the algorithm described in a famous paper by Guy Blelloch to implement prefix sums
frequent round-trips between the CPU and the GPU for launching gqsort kernel and the final launch of the lqsort kernel
necessity to perform housekeeping operations prior to kernel launches on the CPU, while the data for that is generated and readily available on the GPU.
All three of these disadvantages are addressed in our OpenCL 2.0 conversion. You will see that by addressing these shortcomings, the performance of the algorithm improved significantly.
Converting GPU-Quicksort to OpenCL 2.0
In this section we will review the changes made to transform the OpenCL 1.2 implementation to an OpenCL 2.0 implementation that takes advantage of the new device-side enqueue and work-group scan functions.
Work-group functions can improve performance and readability of code in OpenCL C
The first and easiest step of converting GPU-Quicksort to OpenCL 2.0 is to take advantage of the readily available work-group scan functions: specifically, use work_group_scan_inclusive_add andwork_group_scan_exclusive_add functions in both gqsort_kernel and lqsort_kernel. We not only get some measurable performance benefits (~8%), but we gain in code conciseness, maintainability, and clarity reducing the code size associated with prefix sum calculations almost 3X.
Blocks allow us to take advantage of nested parallelism via device-side enqueue
Next, we translated the logic that sorts the records after each gqsort_kernel run into the records suitable for lqsort_kernel processing and the ones that need further subdivision, calculates block and parent records, and launches either gqsort_kernel or lqsort_kernel from C++ into OpenCL C. The lqsort_kernel will be launched only once at the very end of the GPU-Quicksort run. In our first implementation that logic resided at the end ofgqsort_kernel, which required additional global variables and atomics, and made gqsort_kernel relatively slow, even though the whole sample performance improved compared to OpenCL 1.2 version. We moved this logic into a separaterelauncher_kernel, which is now launched as a very first kernel and then at the end of everygqsort_kernel run:
01 // now let’s recompute and relaunch
02 if (get_global_id(0) == 0) {
03 uint num_workgroups = get_num_groups(0);
04 queue_t q = get_default_queue();
05 enqueue_kernel(q, CLK_ENQUEUE_FLAGS_WAIT_KERNEL,
06 ndrange_1D(1),
07 ^{ relauncher_kernel(d, dn,
08 blocks, parents, result, work, done, done_size,
09 MAXSEQ, num_workgroups);
10 });
11 }
Note that relauncher_kernel is launched on only a single work-item (ndrange = 1). Isolating the relauncher logic from the qsort_kernel significantly simplified the qsort_kernel and had the added benefit of improving the performance of the algorithm.
A couple of points about the way we enqueue relauncher_kernel: we use a new feature introduced in OpenCL 2.0—blocks. Since the kernels do not require local memory arguments, we use blocks of type void (^) (void). Blocks are similar to C++ lambdas, but have a different syntax. The block captures the parameters passed into it and therefore avoids the painful job of setting the arguments for the kernel viaclSetKernelArg equivalent. A second point worth mentioning is the way num_workgroups is calculated outside the block and then passed into it. Note that in the code example above thenum_workgroups will be captured by value, which is exactly what we want. If we used get_num_groups(0) directly instead of num_workgroups, it would have been called after the block containing relauncher_kernel call was enqueued and executed, so the value passed torelauncher_kernel would have been 1, instead of the number of work-groups of thegqsort_kernel. For more information on the block syntax used by OpenCL C, see the OpenCL C specification [3].
The relauncher_kernel launches either gqsort_kernel or lqsort_kernel depending on whether there is still work available (work_size != 0) for the gqsort_kernel to perform:
01 if (work_size != 0) {
02 // Calculate block size, parents and blocks
03 …
04
05 enqueue_kernel(q, CLK_ENQUEUE_FLAGS_WAIT_KERNEL,
06 ndrange_1D(GQSORT_LOCAL_WORKGROUP_SIZE * blocks_size,
07 GQSORT_LOCAL_WORKGROUP_SIZE),
08 ^{ gqsort_kernel(d, dn,
09 blocks, parents, result, work, done,
10 done_size, MAXSEQ, 0); });
11 } else {
12 enqueue_kernel(q, CLK_ENQUEUE_FLAGS_WAIT_KERNEL,
13 ndrange_1D(LQSORT_LOCAL_WORKGROUP_SIZE * done_size,
14 LQSORT_LOCAL_WORKGROUP_SIZE),
15 ^{ lqsort_kernel(d, dn, done); });
16 }
Once we launch the first relauncher_kernel from the CPU, subsequent kernel launches are all performed from the GPU. After all the input data is fully sorted, control is returned to the CPU.

Tutorial Requirements
Building and running this tutorial requires a PC that meets the following requirements:
- A processor from the Intel® Core™ processors series code-named Broadwell
- Microsoft Windows* 8 or 8.1
- Intel® SDK for OpenCL™ Applications 2014 R2 or above
- Microsoft Visual Studio* 2012 or above
Running the Tutorial
The tutorial is a console application that generates an array of size Width*Height of random unsigned integers. It then proceeds to sort the copies of that array using std::sort, regular single-threaded quicksort, followed by a number of iterations of sorting with GPU-Quicksort in OpenCL 2.0. The tutorial supports a few command-line options:
Conclusion
An Intel processor with Intel® HD graphics 5300 or above is a complex piece of hardware, but when coupled with the OpenCL 2.0 capable driver, can bring dramatic performance improvements to your OpenCL code. OpenCL 2.0 provides a number of powerful features to the GPGPU programmer. We covered just two of these features: enqueue_kernel function andwork_group_scan_exclusive_add and work_group_scan_inclusive_add functions, and showed that they bring dramatic performance improvements at a relatively small cost, while simplifying and increasing readability of your code. Please consider reading other Intel tutorials on other OpenCL features at Intel® SDK for OpenCL™ Applications Support website.
For more such intel IoT resources and tools from Intel, please visit the Intel® Developer Zone
Source: https://software.intel.com/en-us/articles/gpu-quicksort-in-opencl-20-using-nested-parallelism-and-work-group-scan-functions



